


Warning: number_format() expects parameter 1 to be float, string given in /home/tanu3/toy-drone.com/public_html/wp/wp-content/plugins/weluka/class-weluka-builder.php on line 4614
Warning: number_format() expects parameter 1 to be float, string given in /home/tanu3/toy-drone.com/public_html/wp/wp-content/plugins/weluka/class-weluka-builder.php on line 4614
BNF機のドローンを購入した場合、プロポとBINDするだけでは飛ばせません。BETAFLIGHTでの設定が必要・・なのですが(;´・ω・)飛ばせるまで3日間かかった
目次
UR65飛行レビュー めちゃくちゃ楽しいミニドローン
飛ばした感想は文句なし!(≧▽≦)ノこいつはトイ・ミニドローンとは訳が違うね
今までいろんなドローンを飛ばしてきたけど【初めてが3つ】もあって新鮮でしたw
今までいろんなドローンを飛ばしてきたけど【初めてが3つ】もあって新鮮でしたw
- 初めてのBNF機の購入(プロポとBINDが必要)
- 初めてのマイクロブラシレスレーシング(ミニドローンはレベルが違う!?)
- 初めてのBETAFLIGHT設定・・(苦しむ事3日間)
UR65はBNF機(ドローン初心者講座 BNFとRTF参照)という事で、まず手持ちのプロポ(私の場合はJUMPER T8SG)とBindさせる必要があります
ただ、bindすれば飛ばせるだろう?(・∀・)ニヤニヤくらいに思ってたんですが
ただ、bindすれば飛ばせるだろう?(・∀・)ニヤニヤくらいに思ってたんですが
bindだけでなく、ドローン側のセットアップが必要だったんですね
それもBETAFLIGHTという専用のソフトを使って(遂に来たか・・)
それもBETAFLIGHTという専用のソフトを使って(遂に来たか・・)
ただ、BETAFLIGHTはいろんな動画もあるしちょっと勉強すればできるだろう
・・考えが甘かったのです
・・考えが甘かったのです
以下の動画はUR65が手元に届いてから実に3日間悩み苦しんだ結果
ここを気を付けよう!初心者のBETAFLIGHT設定をまとめてみました
ここを気を付けよう!初心者のBETAFLIGHT設定をまとめてみました
UR65 BETAFLIGHT設定
この動画ではUR65をチューニングせず、プロペラのロック/解除と
ANGLE・HORIZONモードをスイッチ割り当てて、デフォルトで飛ばすという流れです
ANGLE・HORIZONモードをスイッチ割り当てて、デフォルトで飛ばすという流れです
その中でも躓いた点について軽くまとめておきます
- FlyskyXでbindした場合はChannelmapはSpektrum/Graupner/JRを選ぶ
- I Understand the Rsksのチェックを外さないとモーター動作確認はできない
- キャリブレーションして水平にしないとARM/DISARMの動作確認ができない
- OSDのFPV表示配置は見切れるので隅に寄せすぎない
RTF(プロポとセットのタイプ)の場合は届いたら箱から出してすぐに飛ばせますが
BNFの場合は、機体のキャリブレーション、プロポとの感度調整、スイッチの割り当て
BNFの場合は、機体のキャリブレーション、プロポとの感度調整、スイッチの割り当て
こういう流れでセットアップすれば問題なく飛ばせます(≧▽≦)楽しい
※PIDチューニングや他のモードのスイッチ割り当ては任意で
※PIDチューニングや他のモードのスイッチ割り当ては任意で
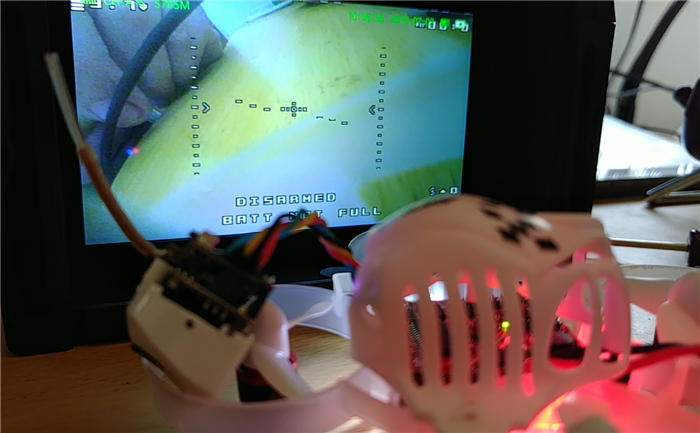
UR65 FPVカメラのchを合わせよう
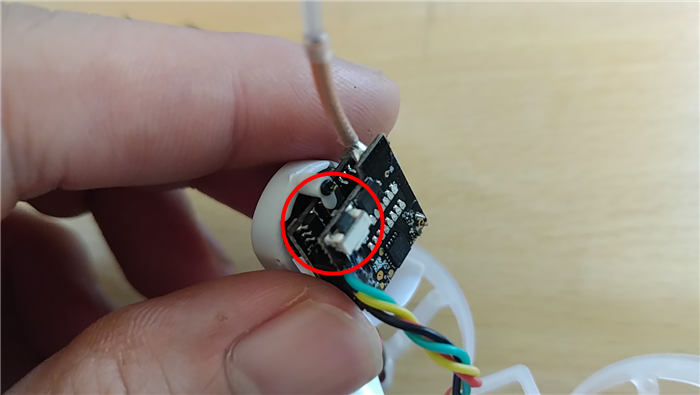
FPVのデフォルトチャンネルがおそらく受信できないチャンネルになっているため
キャノピーを外してFPVカメラのディップスイッチを変更しましょう(説明書参照)
キャノピーを外してFPVカメラのディップスイッチを変更しましょう(説明書参照)
FPVゴーグル側でチャンネルを合わせて映像を確認すると確実です
UR65 充電に関する注意
付属の充電器はUSB・5V・3Sバッテリー(TX60コネクタ)の3つの充電方式がありますが、充電が一番早いのは3Sのリポバッテリーです
ただ、3Sバッテリーの場合、以下の点にご注意ください
ただ、3Sバッテリーの場合、以下の点にご注意ください
充電する側の3Sバッテリーの容量が給電中に少なくなる
充電器側には過充電防止機能がついているため、充電するHI-LIPOバッテリーの充電が終わると充電はストップしますが
3Sリポバッテリーの電圧が下がった状態でHI-LIPOバッテリー側の充電が溜まってない状態だととても危険です・・
3Sリポバッテリーの電圧が下がった状態でHI-LIPOバッテリー側の充電が溜まってない状態だととても危険です・・
私はそれで3セルバッテリーを一本ダメにしてしまいました・・
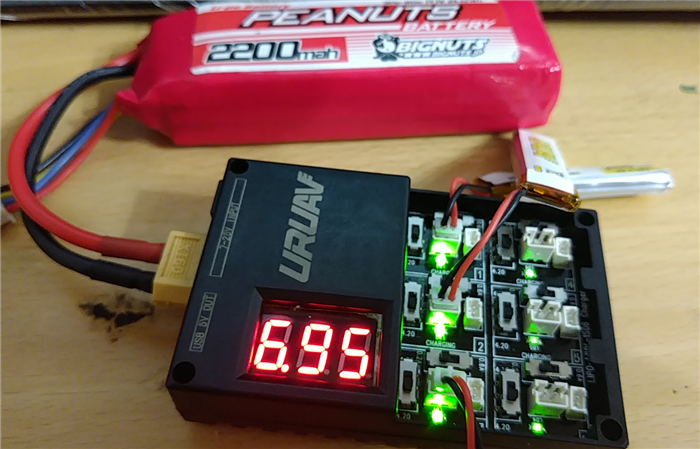

何回かUR65をテスト飛行しては充電を繰り返してたんですが、しばらくたって確認すると
え?(゚Д゚;)3Sなら最低で11.1Vのはずなのに・・6.95V!?だと
え?(゚Д゚;)3Sなら最低で11.1Vのはずなのに・・6.95V!?だと
つまり、1セル死んだだけじゃなく、2セルのデッドラインすら危うい状態になってたので
これは危険だと判断して、塩水の海に投げ込んだのさ・・(。-人-。) チーン
これは危険だと判断して、塩水の海に投げ込んだのさ・・(。-人-。) チーン
こうならないために一番いいのはUSB給電、DC5Vでの充電なのですがめちゃくちゃ時間がかかります
なので3セルバッテリーを使って充電する場合は次の点を気を付けてください
なので3セルバッテリーを使って充電する場合は次の点を気を付けてください
- 充電する前に3セルバッテリーの充電を満タンにして使おう
- 何回充電したか数えておこう(2200の場合≧250×8~9回が限度)
- バッテリーチェッカーがあるなら充電後の減りを確認しよう
UR65まとめ 軽く外で飛ばすのにちょうど良いミニドローン
海外の人がよく駐車場なんかで気軽に飛ばしてる理由がわかりました
これ、ちょっと開けた空間なら気軽に飛ばせるので場所を選ばない(山まで行かなくていいw)
これ、ちょっと開けた空間なら気軽に飛ばせるので場所を選ばない(山まで行かなくていいw)
機体自体がとても軽く軽量なので駐車場や公園など周りに人がいても怪我させる心配もないです
むしろ興味津々に周りが声をかけてくる始末(笑)
むしろ興味津々に周りが声をかけてくる始末(笑)
マイクロブラシレスモーターなので寿命も長くこれからも重宝する愛機になりました(≧▽≦)
※BNF機なので操作用のプロポが別途必要です

URUAV UR65 価格
※価格はセール等で変動するのでリンク先のショップを参照 通常価格:約10000円~
JUMPER T8SG価格
※価格はセール等で変動するのでリンク先のショップを参照
通常価格:約6700円~



ドローン初心者です。
T8SG V2.0 Plus+US65 の ペア。 最後で壁にぶち当たっています。
Arm できない → プロポ スロットルの Scale を125から100に変更すれば Arm可能。
但し、Motor が回転するのは Aileron・Elevator・Rudder 操作時のみであり、
Throttle を操作しても、Motor は回転しない。
解説通りの設定を行っているつもりですが、
どこか勘違いしている部分があるのでしょうか?
junjunさん いらっしゃい
bindとarmはできてるみたいですね
で、スロットル以外を操作するとモーターが回転するとの事ですが
もしかしてオーバーフリップファンクションを割り当ててないでしょうか?
us65は起き上がりのオーバーフリップを割り当てた場合動きとしては
スロットル以外でモーターが回転するようになりますので(;^ω^)
オーバーフリップスイッチ→armという状態になると
一度armを解除→オーバーフリップをoffにして→再びarmが必要です
他の可能性としては、チャンネルマップが違うというのもあるかもしれませんが
おそらく、症状から見て、オーバーフリップファンクション(起き上がり)だと思いますのでご確認ください
ドロマニ さん
早速の ご回答ありがとうございます。
正に ご指摘の通りでした!
こちらの動画を何度も確認しながら設定を行っていたので、
全く身に覚えの無い他の設定がなされているとは夢にも思いませんでした。
とりあえず FLIP OVER AFTER CRASH 及び AIR MODE 設定を無効にすることで、
初フライトに成功しました (^v^)♪
なお mocca さんのブログで
“ Frysky-Xだとプロポのコンフィグが上手く設定出来なかったので
FrySky-Dでバインドしました ” との記述を目にして、
そちらでも同様の質問をさせて頂いたところでした。
どうも失礼致しました。
これからも 宜しくお願い致します。
junjunさん いらっしゃい
やっぱりフリップオーバーでしたかw
うまく行ったようでよかったですね(≧▽≦)
ドローンマニアック様
いつも参考にさせてもらっております。
今回Jumper T8SG V2.0 PlusとUR65の組み合わせで飛ばそうとしているます。
ですが、Bind後、Betalightで設定をしようとするとアームができず設定ができずにおります。
Betaflightの左上にもアーム無効と出ています。
アーム無効時の注意点は確認しクリアしていると思っています。
例えば機体を水平にする、キャリブレーションさせるなど。
どうもBetaflightの受信機タブを見ているとスロットルやRollなどのレバーがピコピコと連続的に動いています。
なので、アーム以前にBindが断続的に切れているような感じがしています。
その証拠にUR65のBindのLEDがたまに点滅したりします。
ただBetaflightとはつながず、UR65とJumper plus V2だけでBindさせると、この点滅は起こりません。
なので、Betaflightと繋ぐと発生する現象になっています。
言葉だけで伝わりますでしょうか?
必要でしたら現象の動画のリンクを送付することも可能です。
お手数おかけしますがアドバイス頂けましたら幸いです。
Takaさん いらっしゃい
betaflightでレバーが反応してるという事はbindは問題なさそうですね
アームが無効に関しては、Betaflight上での設定だけではなくT8SG側で
ミキサーからスロットルを下げた時の出力(scale-側を120~130)に下げないとアームが解除されないケースがあります
詳しくはこちらの動画を参考にしてみてください
https://youtu.be/i_MiiEJLzks
モードのタグがどうしても黄色くなりません。
初心者ですが、よろしくお願いします。
74さん いらっしゃい
arm関連であれば、こちらの動画も参照ください
https://youtu.be/i_MiiEJLzks
ドロマニ様
bindボタンを2秒以上押しても、bandモードに入らず、led 点滅のままです
bind出来ず、困っています
ご教授頂けないでしょうか?
k2さん いらっしゃい
受信レシーバーがflskyやdsm2によってやり方が違います
また、押すbootボタンが違うという可能性もあります(;^ω^)
レシーバーがflskyやfrskyの場合、基本的に正しいbootボタンを長押しすればbind状態になるはずですが、dsm2やdsmxの場合
bootボタンを押したまま、バッテリーを接続するとbind待機状態になり、その状態でプロポ側でbindさせます
1:bootボタンが間違ってないか確認(キャノピー開ける必要あり)
2:受信レシーバー事のbind手順を行う
3:プロポ側で違うプロトコル選んでないか確認
以上、気を付けてみてください(/・ω・)
ドロマニ様
ご回答ありがとうございます
すいません 情報不足でした
T8SGとur 65での組合せで、frskyXで、bindさせようとしています。
boot ボタンは間違えないと思うのですが、反応しないじょうたいです。
k2さん お返事が遅れました
問題が解決してれば気にしないでください
bootボタン長押しでもいかない場合の対策ですが
バッテリーを外した状態で、bootボタンを押しながら、バッテリーを繋ぐという方法があります
比較的このやり方が多いような気もしますが、もしうまくいってなければ試してみてください